
The Michigan Scientific Μετατροπέας παλμών τροχού υψηλής ανάλυσης (WPT) είναι ένας οπτικός κωδικοποιητής που προσαρμόζεται στα παξιμάδια του τροχού ενός οχήματος. Το WPT χρησιμοποιείται συνήθως για την παρακολούθηση της θέσης και της ταχύτητας ενός οχήματος για εφαρμογές όπως η διαχείριση στόλου και αυτόνομη παρακολούθηση οχημάτων. Αυτή η μελέτη περίπτωσης θα δείξει την ακρίβεια της χρήσης δύο μετατροπέων παλμών τροχού μαζί, συγκρίνοντας τις μετρήσεις θέσης και ταχύτητας με δεδομένα GPS.
Πώς Λειτουργεί
Το σήμα από τον κωδικοποιητή χρησιμοποιείται για τον υπολογισμό της γωνιακής θέσης και της ταχύτητας του τροχού. Τα δεδομένα που καταγράφονται από δύο WPT σε κάθε πλευρά του αυτοκινήτου μπορούν να υπολογιστούν κατά μέσο όρο για να βρεθεί το κέντρο, δίνοντας έτσι την πιο ακριβή αναπαράσταση της απόστασης και της ταχύτητας που έχει διανύσει το αυτοκίνητο. Τα οχήματα χαρτογράφησης χρησιμοποιούν συχνά WPT για να αντισταθμίσουν τις διακοπές στο σήμα GPS, επιτρέποντας την παρακολούθηση της απόστασης που διανύθηκε κατά τη διάρκεια της απώλειας σήματος. Σε αυτή τη μελέτη, η υψηλή ανάλυση των δεδομένων WPT απέδωσε πολύ καλύτερα από αυτή του αισθητήρα GPS που χρησιμοποιήθηκε λόγω του υψηλού ρυθμού δειγματοληψίας των 10,000 Hz.
Δοκιμή ρύθμισης
Για να συγκριθούν τα αποτελέσματα του Wheel Pulse Transducer με τα αποτελέσματα του GPS, δύο συστήματα WPT προσαρτήθηκαν σε ένα όχημα, ένα στην πίσω δεξιά πλευρά και ένα στην πίσω αριστερή πλευρά. Οι μορφοτροπείς συναρμολογήθηκαν στους πίσω τροχούς έτσι ώστε η στροφή των μπροστινών τροχών να μην αντισταθμίζεται στα δεδομένα. Μια συσκευή GPS τοποθετήθηκε στην κορυφή του οχήματος, στο κέντρο της οροφής πάνω από τους πίσω τροχούς, όπου θα έδινε την πιο ακριβή ένδειξη. Οι αποστάσεις και οι ταχύτητες WPT αριστερά και δεξιά υπολογίστηκαν κατά μέσο όρο για να ταιριάζουν με το σήμα GPS στο κέντρο του οχήματος. Η διαδρομή μήκους μιλίου που φαίνεται παρακάτω, μαζί με μια γραφική παράσταση γεωγραφικού πλάτους και μήκους από το GPS, περιλαμβάνει έναν ελιγμό κυκλικής καμπύλης και έναν ελιγμό ζιγκ-ζαγκ.
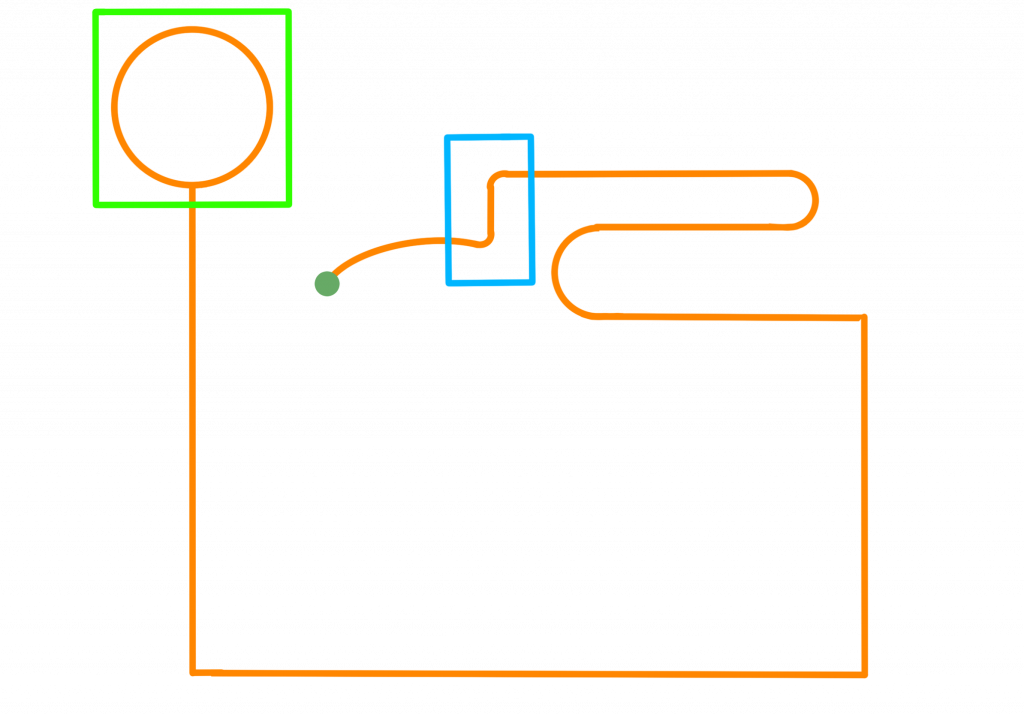
Περίγραμμα δοκιμαστικής διαδρομής
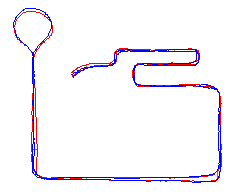
Δεδομένα GPS από τη δοκιμαστική διαδρομή
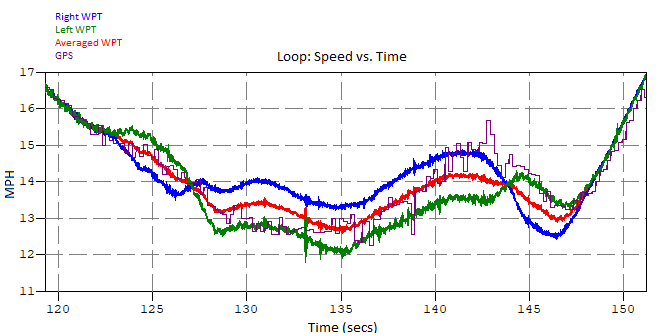
Βρόχος
Όταν πηγαίνετε αριστερόστροφα γύρω από το κυκλικό τμήμα της διαδρομής δοκιμής (που φαίνεται με πράσινο παραπάνω), θα περίμενε κανείς ότι η ταχύτητα και η απόσταση του δεξιού τροχού θα είναι πολύ υψηλότερες από τον αριστερό. Εξετάζοντας τα δεδομένα, που φαίνονται παρακάτω, διαπιστώνεται ότι αυτό είναι αλήθεια. Οι ταχύτητες του δεξιού (μπλε) και του αριστερού (πράσινου) τροχού υπολογίζονται κατά μέσο όρο (κόκκινο) και ευθυγραμμίζονται σχεδόν τέλεια με τα δεδομένα GPS (μωβ).
Μονοπάτι ζιγκ-ζαγκ
Η περιοχή που περιέχει μια γρήγορη στροφή δεξιά και αριστερά, που φαίνεται μέσα στο μπλε τετράγωνο στο περίγραμμα της πίστας δοκιμής παρέχει μια άλλη ενδιαφέρουσα προοπτική. Για το παρακάτω διάγραμμα ταχύτητας, το όχημα ελίχθηκε με μια γρήγορη αριστερή στροφή και μετά μια άμεση δεξιά. Το σχήμα "W" που δημιουργήθηκε από αυτό δείχνει ότι ο αριστερός τροχός (μωβ) πήγε πιο αργά από τον δεξιό (πράσινο) γύρω από την αριστερή στροφή, μετά ο αριστερός πήγε πιο γρήγορα από τον δεξιό γύρω από τη δεξιά στροφή. Ενώ οι δύο αντίπαλες πλευρές ανταλλάσσουν θέσεις σε όλη τη διάρκεια του ελιγμού, ο υπολογισμένος μέσος όρος (κόκκινο) και τα δεδομένα GPS (μπλε) παραμένουν κοντά μεταξύ τους στη μέση.
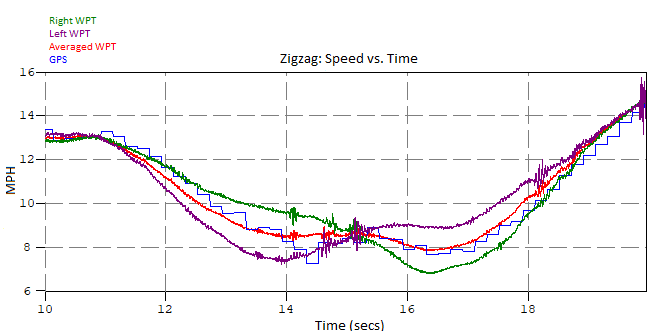
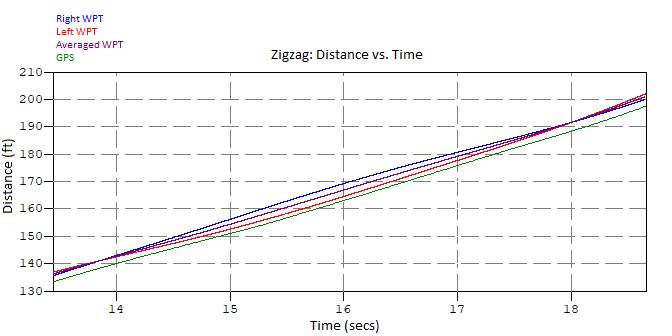
Ο χρόνος μεταξύ των δύο σημείων τομής στο παρακάτω γράφημα είναι ο τόπος όπου σημειώθηκαν οι αριστερές και οι δεξιές στροφές. Ο δεξιός τροχός (μπλε) ξεπερνά τον αριστερό τροχό (κόκκινο) σε απόσταση που διανύθηκε, καθώς έχει μεγαλύτερη ακτίνα για να κινηθεί κατά την αριστερή στροφή, η οποία ξεκινά περίπου 14 δευτερόλεπτα και τελειώνει σε περίπου 15.5 δευτερόλεπτα. Σε αυτό το σημείο, ο δεξιός τροχός έχει ταξιδέψει πιο μακριά από τον αριστερό τροχό. Η δεξιά στροφή ξεκινά λίγο πριν από τα 17 δευτερόλεπτα και ο αριστερός τροχός πιάνει τον δεξιό τροχό μέχρι να τελειώσει η στροφή στα 18 δευτερόλεπτα περίπου. Η μέση (μωβ) απόσταση που διανύθηκε παραμένει στο κέντρο μεταξύ των δύο. Επειδή η κλίση της μέσης απόστασης και του GPS είναι η ίδια, εξακολουθούν να καταγράφουν την ίδια ταχύτητα και την ίδια αλλαγή στην απόσταση. Ωστόσο, το GPS μένει λίγα μέτρα πίσω από το τιμόνι, εξ ου και η μικρή μετατόπιση στα δεδομένα.
Λάθος
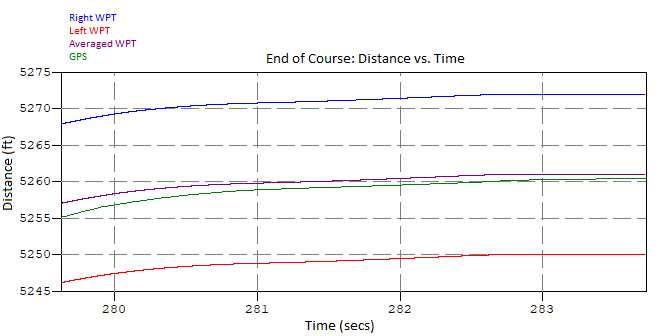
Τα τελευταία λίγα σημεία δεδομένων της δοκιμής μπορούν να δείξουν τα οφέλη από τη χρήση δύο WPT και όχι μόνο ενός. Εάν χρησιμοποιήθηκε μόνο ένα WPT, οι καταγεγραμμένες αποστάσεις θα είχαν μέγιστο σφάλμα 0.22%. Ωστόσο, με την εγκατάσταση δύο WPT και τον μέσο όρο τους, το σφάλμα είναι μόνο 0.0115%, μείωση του συντελεστή 19. Αυτό δείχνει ότι η χρήση δύο μετατροπέων παλμών τροχού μπορεί να βοηθήσει στη μείωση του σφάλματος που μπορεί να συσσωρευτεί σε πολλές στροφές.
Αυτό το τεστ είναι μόνο ένα από ένα πλήθος διαφορετικών δοκιμών που χρησιμοποιούν μετατροπείς παλμών τροχού. Η ύπαρξη ενός ανθεκτικού και ακριβούς συστήματος μέτρησης είναι ευεργετική για την ακριβή παρακολούθηση της θέσης και της ταχύτητας ενός οχήματος σε οποιοδήποτε περιβάλλον. Εάν θέλετε να συζητήσετε την αίτησή σας για τη δοκιμή τροχών, επικοινωνήστε με έναν εκπρόσωπο του Michigan Scientific σήμερα.